嵌入式兩軸伺服運動控制系統
特色:
利用浮點DSP為運算控制處理器,進行兩軸伺服馬達運動控制,並利用eCAN匯流排進行網路溝通與控制。包含中文與實驗控制手冊將是學習與研究上一大利器。
硬體功能:
-
24V電源輸入,隔離式5V和3.3V輸出
-
隔離式eCAN端子頭,使用RJ-45接頭
-
一組JTAG連接頭
-
兩組馬達控制接頭,可控制兩軸AC110/220V伺服驅動器與伺服馬達
-
隔離式6個輸入乾接點,結合開關偵測
-
隔離式5個輸出乾接點,結合IO控制
-
兩組32位元編碼器(A/B/Z)輸入,讀取伺服馬達位置
-
16組保護過電壓ADC輸入(0~3V)
軟體功能:
甲、基本功能
-
馬達驅動命令的控制
-
馬達正逆轉控制
-
馬達梯形加減速的處理
-
馬達位置讀回與計算目前位置
-
提供嵌入式程式撰寫與編譯之環境
-
支援C編譯/組譯及聯結器(Compiler, Assembler, and Linker )
-
操作與程式說明手冊
乙、應用說明
-
馬達正轉控制: 接收CAN匯流排傳進來的命令,進行馬達正轉,DSP控制馬達從啟動->加速運轉->減速運轉->馬達停止
-
馬達逆轉控制: 接收CAN匯流排傳進來的命令,進行馬達逆轉,DSP控制馬達從啟動->加速運轉->減速運轉->馬達停止
-
馬達回歸零點控制: 接收CAN匯流排傳進來的命令(例如歸零點),進行馬達正轉或逆轉,DSP控制馬達從啟動->運轉->碰到硬體上有接觸開關接點訊號- >馬達停止
-
馬達目前位置量測:透過DSP模組上的QEP功能來獨去目前馬達的位置資訊
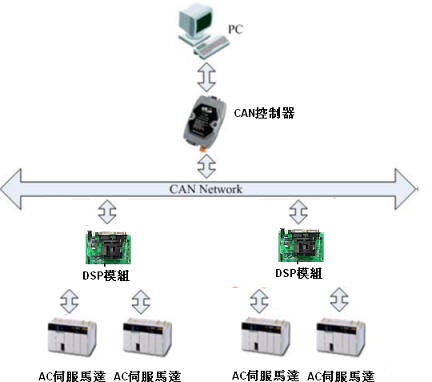
架構圖:
DSP控制板圖:
